Busca de Produtos


Este sistema refere-se a um método de produção, em que todo o processo é controlado por CLP e conta com processos de controle de malha fechada com base em informações em tempo real dos sensores.
Esse sistema didático possui em seu conjunto:
Painel de Controle Contendo:
- 01 (um) CLP capaz de controlar todo o sistema, software de programação do CLP compatível com a norma IEC 61131‐3 em português.
- 01 (um) Módulo I/O digital AS-I, módulo I/O digital Profibus-DP, módulo I/O digital Ethernet terminal de válvula com interface de comunicação AS-I, terminal de válvula convencional.
- 01 (uma) Interface Homem Máquina (IHM) para desenvolvimento das telas de interface com o operador e supervisão do sistema.
- Botão de partida;
- Botão de parada;
- Botão de emergência.
01 (um) Depósito para separação de peças.
01 (um) Unidade de tratamento de ar com filtro.
01 (um) Regulador de pressão
01 (um) Manômetro
01 (um) Válvula de alimentação do sistema com conexão de engate rápido para tubo de 8mm e terminais de eletroválvulas pneumáticas, com possibilidade de acionamento manual e led indicador de acionamento.
01 (um) Conjunto de peças de trabalho com 5 peças metálicas, 5 peças não metálicas e 5 peças plásticas (ptfe) com dimensões e formato apropriado para a garra do manipulador cartesiano.
01 (um) Software supervisório tipo Scada para simulação do sistema bem como seu comando através de comunicação com o CLP.
01 (um) Conjunto de cabos e conectores para as redes de comunicação.
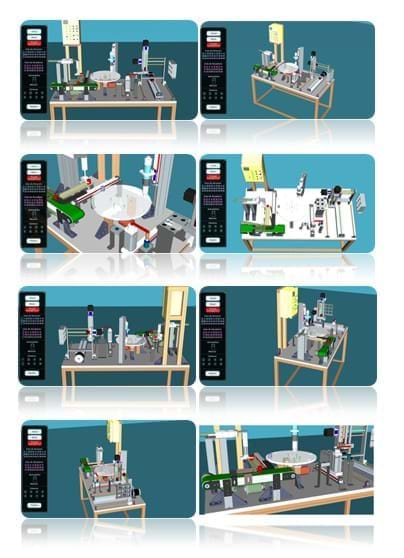
O sistema é dividido basicamente por:
- Unidade Esteira Transportadora
- Unidade de Transferência Linear
- Unidade Pick and place
- Mesa Rotativa
- Sistema de Inspeção Visual
- Unidade de Descarga
- Módulo de Pesagem
- Unidade Armazenagem XYZ
Unidade de Esteira Transportadora: Os materiais são transferidos num movimento linear por meio da correia transportadora conduzida por motoredutores CC; esta unidade deve mover materiais / objetos a partir de uma extremidade para a outra.
Sensores são utilizados para detectar a presença de peças e materiais. Este será um modelo em miniatura de um sistema de transporte industrial real.
Esta unidade terá as seguintes características mínimas:
- Modelo: Esteira Transportadora
- Tipo: Horizontal Correia plana
- Comprimento: 500 mm
- Largura: 51 milímetros
- Unidade: 24VDC Motor engrenado.
- Sensores de detecção de Material: Tipo capacitivo e indutivo
- Material da correia: Tecido Nylon
- Número de I / O: 3 Entradas e 1 Saída
Unidade de Transferência Linear: Este módulo consisti em um atuador linear eletropneumático controlado. Chaves magnéticas são fixadas para detectar a posição retraída e estendida da unidade de transferência. Esta unidade deve transferir materiais da esteira transportadora para uma unidade de alojamento, com a ajuda de um cilindro sem haste de duplo acionamento pneumático.
Esta unidade terá as seguintes características mínimas:
- Modelo: Unidade de Transferência Linear
- Tipo: Pneumático.
- Cilindro: Haste do cilindro pneumático (12 milímetros de diâmetro e comprimento de 200 milímetros)
- Comprimento da haste: 200 mm
- Pressão de funcionamento: 6 Bar
- Número de I / O: 2 Entradas e 2 Saídas
- Dois sensores magnéticos: Bobina de Tensão de 24 VDC
Unidade Pick and place: Este módulo transfere o material a partir do final da unidade de transferência linear para a próxima unidade, com a ajuda de um braço vertical, braço horizontal e pinça angular. A Unidade de pick and place deve ser um sistema de controle totalmente eletropneumático. Haverá três partes principais desta unidade: 1. Braço vertical (vertical cilindro de duplo efeito) 2. Braço horizontal (horizontal cilindro de duplo efeito) e 3. Pinça Angular.
Interruptores magnéticos são fixados para detectar a posição retraída e estendida do atuador.
Esta unidade terá as seguintes características mínimas:
- Curso vertical: 80 milímetros
- Deslocamento horizontal: 150mm
- Capacidade de Carga: 0,5 kg
- Cilindros: um cilindro vertical com duplo efeito (dois sensores magnéticos na posição retraída e estendida do cilindro, bobina de tensão de 24 V)
- Uma Horizontal cilindro de duplo (dois sensores magnéticos na posição retraída e estendida do cilindro, bobina de tensão 24V)
- Pinça Angular
- Pressão de operação: 6 Bares
- Número de I / O: 4 Entradas e 3 Saídas
Unidade com Mesa Rotativa: Este módulo consiste em numa mesa de trabalho circular horizontal, sobre a qual a peça de trabalho é posicionada para ser processada. A mesa de trabalho deve ser indexado para apresentar cada peça a cada passo realizando a seqüência de operações de usinagem.
Esta unidade terá as seguintes características mínimas:
- Motorizada: 24 VDC, 4800 rpm, Redutor 1: 480, velocidade final de 10 rpm
- Sensor de indexação: Tipo indutivo.
- Número de I / O elementos: 1 Entrada e 1Saída
Sistema de Inspeção Visual: Compacto sensor visual, que é usado para inspeções de controle de qualidade em linhas de produção automatizadas. O sistema de visão deve servir sob a classe de métodos de detecção visual. O sistema de visão, basicamente, deve analisar uma imagem obtida por uma câmera de vídeo, exibi-la e relatar suas características para o controlador do sistema.
Esta unidade terá as seguintes características mínimas:
- Definindo a distância (L) 38 a 194 milímetros
- Gama de detecção (C): 10 a 50 mm
- Guia de luz: Fornecido (centro, área de detecção)
- Built-in lente: Foco f13.47
- Método de iluminação Objeto: Pulso de iluminação
- Objeto de fonte de luz: Oito LEDs vermelhos
- Elemento sensor: 1/3 polegadas CCD
- Tensão de alimentação: 15 VDC (fornecidos pelo amplificador)
- Consumo de energia: Aprox. 200 mA
- Monitor com Painel de Controle - unidade de amplificação
- Especificações de saída NPN coletor aberto, 30V DC, 50mA máximo, tensão residual:. Máximo 1.2V.
Unidade de Descarga: Esta unidade consisti em um sistema de eletropneumático no qual o movimento é controlado por um atuador linear e rotativo. Este sistema funciona para transferir os componentes ou peças de trabalho a partir de uma estação de trabalho para o outro.
Esta unidade terá as seguintes características mínimas:
- Braço de levantamento: atuador duplo efeito Linear,
- Atuador diâmetro: 40 mm, comprimento 50 mm de curso
- Número de I / O: 4 Entradas e 3 Saídas.
Módulo Pesagem: Célula de carga
A célula de carga tem de gerar um valor de resistência variável relacionada com o peso do objeto que está colocado sobre ele. O circuito de interface recebe, processar e envia este valor à entrada analógica do CLP, que determina o peso correspondente da peça de trabalho colocada sobre a célula de carga.
Unidade Armazenagem XYZ: Este módulo é utilizado para colocação a peça de trabalho em ordem determinada, em um magazine de peças fabricado em nylon.
- Pinça Angular
- Motor de Passo
- Manipulador XYZ
- Sensores indutivos: usado para detectar a posição x, casa do eixo Y
- Pressão de funcionamento: 6 bar
- Número de I / O - 1 Entrada e 5 Saídas
Opcional:
Módulo Simulador de Maquinas Virtual
Formado por software SIM VT 3D, e placa de i/os, onde o software interage a animação do ambiente virtual com o controlador lógico programável através de um módulo de entradas e saídas, alimentação 24vcc.
- Simulador com licença individual com as seguintes características:
- Animação virtual de máquinas através de gráficos em 3d, em tempo real e com som; interatividade nos ambientes virtuais, com seleção de câmeras, controle de zoom e movimentação das mesmas pelo ambiente através do mouse do computador;
- Testes de partes do circuito de produção em modo manual;
- Visualização online do estado atual dos sensores e atuadores utilizados no ambiente virtual, bem como, forçar o estado dos atuadores.
- 06 (seis) ambientes de simulação com diferentes níveis de dificuldade.